盖世汽车讯 传统机器人,例如用于工业和危险环境的机器人,易于建模和控制,但过于僵硬,无法在狭窄空间和不平坦地形中操作。柔软的仿生机器人则更善于适应环境,并在其他难以触及的地方进行操控。然而,这些更灵活的功能通常需要一系列机载传感器和针对每个机器人设计量身定制的空间模型。
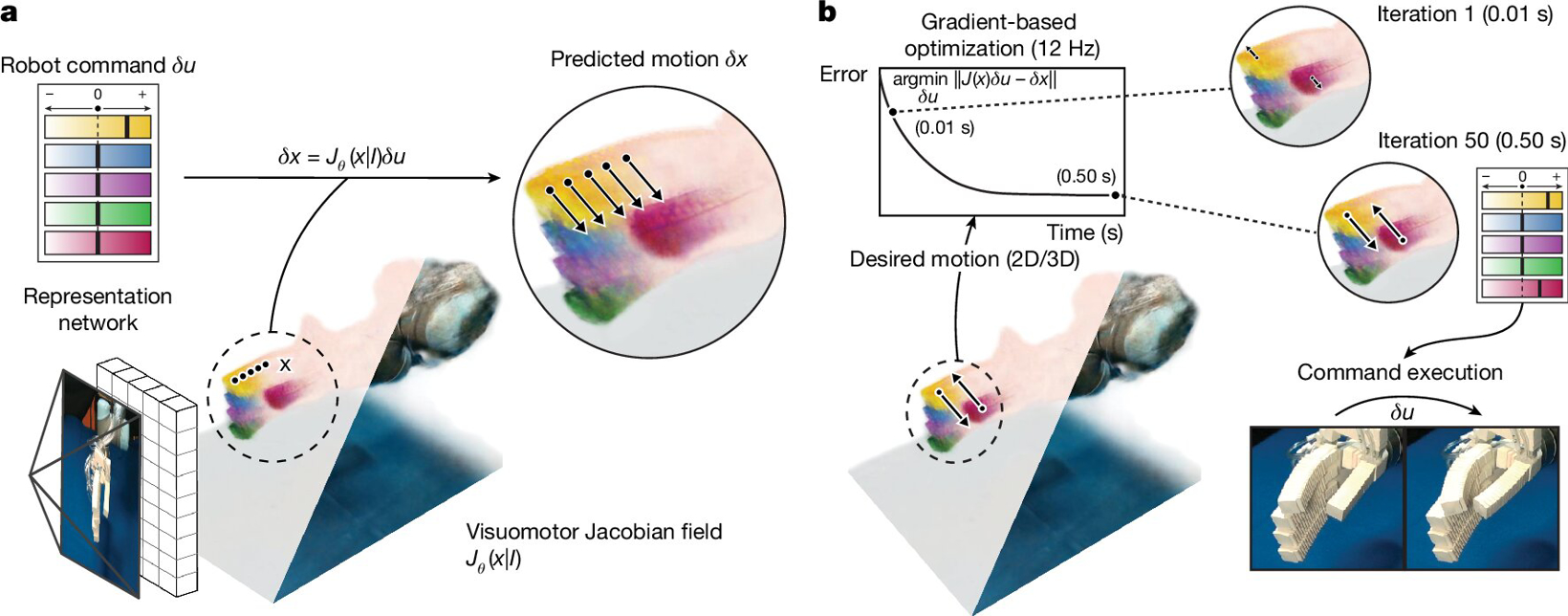
图片来源: 期刊《Nature》
据外媒报道,麻省理工学院(MIT)的研究人员采用一种全新且资源需求更低的方法,开发了一种复杂程度更低的深度学习控制系统,该系统只需一张图像就能教会柔软的仿生机器人移动并执行指令。相关研究成果发表在期刊《Nature》上。
- 随机文章
- 热门文章
- 热评文章
- 鸿海研究院推出人工智能ModeSeQ 可快速读取行人和车辆运动
- 底盘的智能化趋势及辅助驾驶对底盘的需求 | 盖世大学堂智能底盘技术开发系列知识讲解
- 中国批准新思科技以350亿美元收购Ansys
- 吉利ICON巧克力上市 售价8.98-9.58万元
- 小鹏汇天完成2.5亿美元B轮融资,“陆地航母”量产进程全面提速
- Rho Motion:6月全球电动车销量同比大增24%
- 联合研究团队开发出新制造方法 有望淘汰锂离子电池中的镍和钴
- 必和必拓分别与比亚迪及宁德时代签署电池技术合作协议